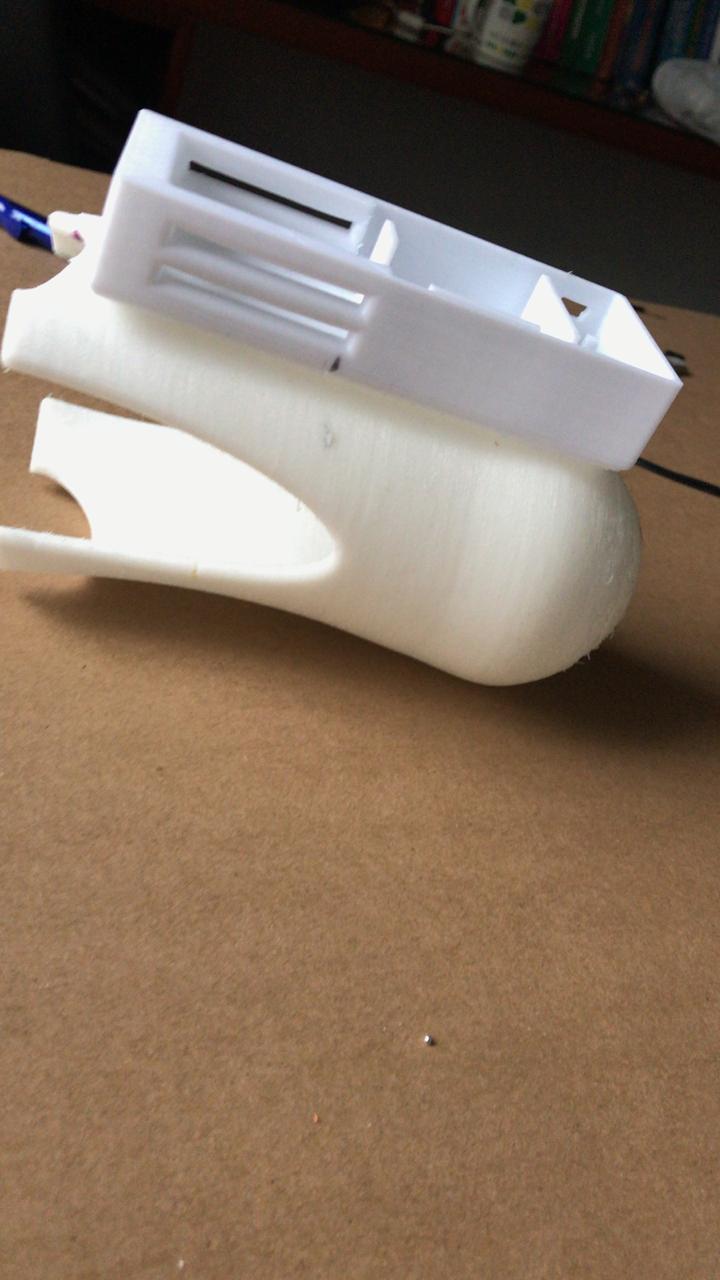
La caja se acopló al socket con pegamento instantáneo SuperGlue, aprovechándo las superficies planas que se dejaron durante el modelado 3D.
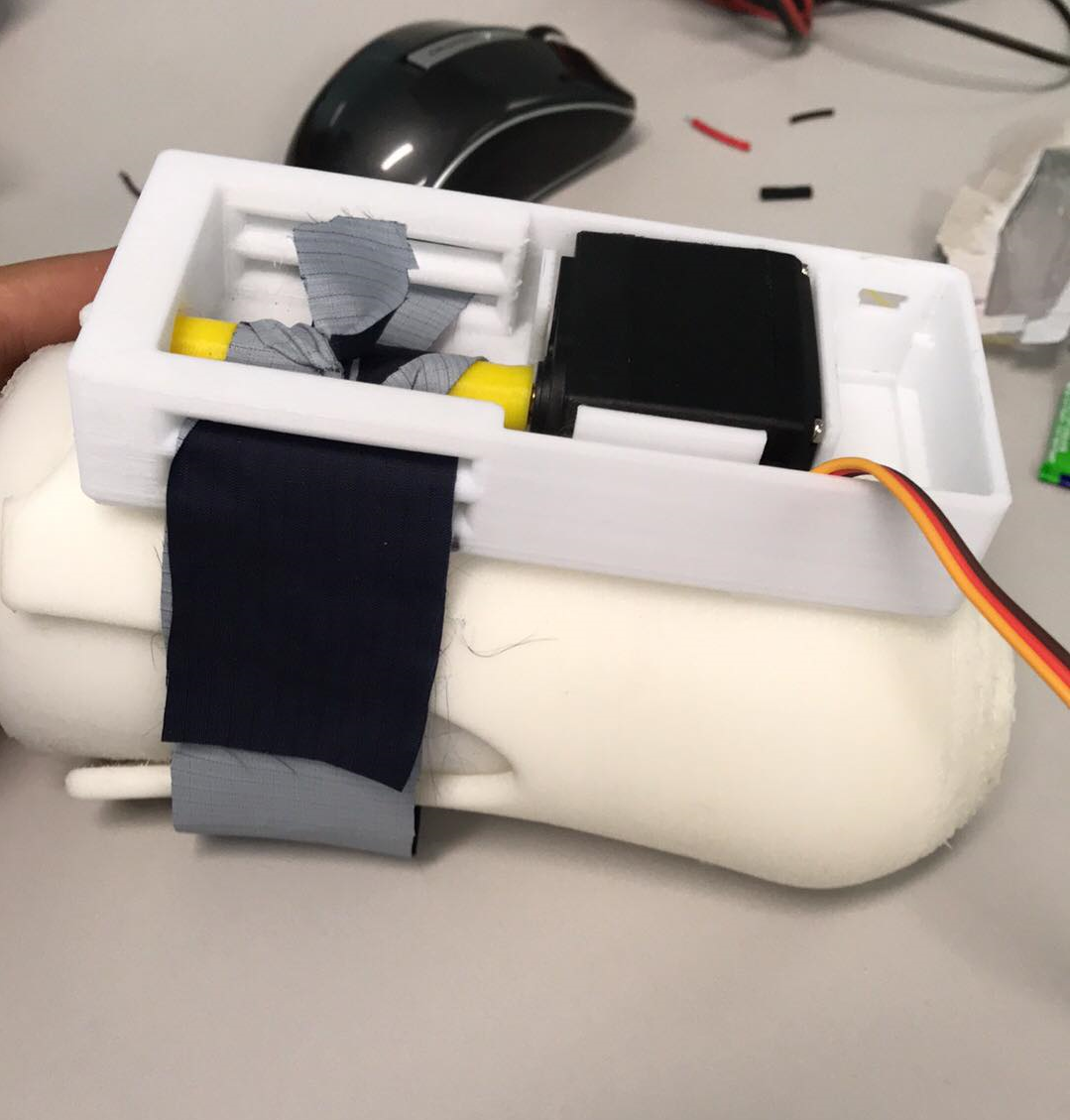
Luego, se colocó cada componente en su lugar dentro de la caja. No hubo mayor problema , pues esta se modeló a la medida de cada componente. Sin embargo, tuvimos que hacer uso del cautín para ensanchar la apertura del cilindro de ajuste, pues no calzaba en el engranaje del servomotor, y para cortar los alerones del servomotor, como se hizo virtualmente durante el ensamblaje por computadora. Esto sucedió porque la tolerancia de la impresión es de 1.2 mm; no obstante, no previmos que la separación entre los dientes del engranaaje es menor a 1 mm.
En este momento, se tiene dificultades en colocar la circuitería (la unidad de control y los cables permanecen afuera por ahora), pues el espacio es reducido. Por lo demás, por el momento se ha optado por atar la banda de nylon al cilindro de ajuste, y no clavarlo ni hacer hoyos a lo largo, como se pensó en un inicio. Esto porque debilitaríamos la estructura del cilindro: podría romperse.